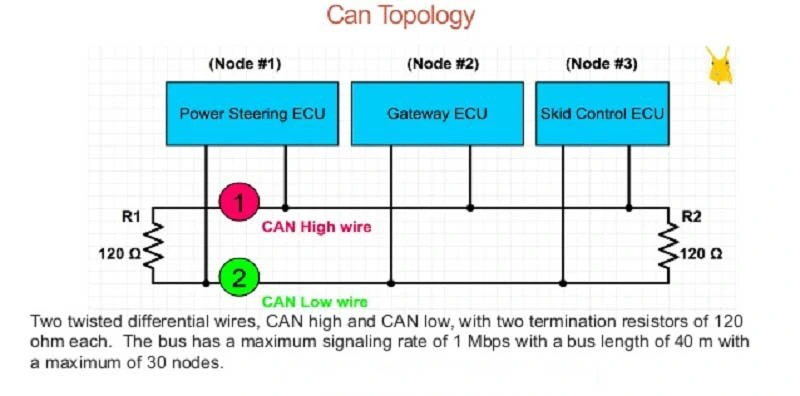
Hệ thống CAN (Controller Area Network) được sử dụng rộng rãi trong các xe điện, bao gồm xe VinFast, để giao tiếp và đồng bộ dữ liệu giữa các bộ phận. CAN H (High) và CAN L (Low) là hai dây chính của hệ thống truyền thông này.
Dưới đây là nguyên lý hoạt động của CAN H và CAN L trong hệ thống sạc xe VinFast:
1. Cơ chế hoạt động cơ bản của CAN H và CAN L
- CAN là tín hiệu vi sai:
- CAN H và CAN L hoạt động theo nguyên lý tín hiệu vi sai, tức là dữ liệu được truyền dựa trên sự chênh lệch điện áp giữa hai dây.
- Ở trạng thái idle (không truyền dữ liệu), cả hai dây đều có mức điện áp khoảng 2.5V.
- Khi truyền dữ liệu:
- CAN H tăng lên khoảng 3.5V.
- CAN L giảm xuống khoảng 1.5V.
- Sự khác biệt này giúp hệ thống chống nhiễu tốt hơn trong môi trường điện từ phức tạp.
- Chế độ truyền thông:
- Tín hiệu “Dominant” (0 logic): CAN H > CAN L.
- Tín hiệu “Recessive” (1 logic): CAN H ≈ CAN L.
2. Ứng dụng trong sạc xe VinFast
Trong quá trình sạc xe, hệ thống CAN đóng vai trò quan trọng trong việc quản lý và truyền thông tin giữa các thành phần như bộ điều khiển sạc (OBC – On-Board Charger), pin, và trạm sạc (EVSE).
- Giao tiếp giữa xe và trạm sạc:
- CAN bus truyền các tín hiệu quan trọng như:
- Trạng thái sạc của pin (SoC – State of Charge).
- Dòng điện và điện áp sạc tối ưu.
- Tình trạng nhiệt độ của pin.
- Các lỗi trong quá trình sạc (nếu có).
- CAN bus truyền các tín hiệu quan trọng như:
- Đảm bảo an toàn:
- CAN H và CAN L truyền các tín hiệu điều khiển để ngắt kết nối trong trường hợp:
- Dòng sạc vượt ngưỡng an toàn.
- Pin hoặc bộ sạc gặp sự cố.
- CAN H và CAN L truyền các tín hiệu điều khiển để ngắt kết nối trong trường hợp:
- Đồng bộ hóa dữ liệu:
- CAN bus giúp đồng bộ hóa thông tin giữa trạm sạc và xe, đảm bảo sạc hiệu quả mà không gây tổn hại pin.
3. Ưu điểm của CAN H và CAN L trong sạc xe VinFast
- Khả năng chịu nhiễu cao:
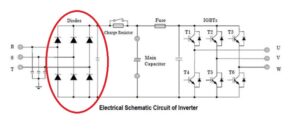
- Với cấu trúc vi sai, hệ thống CAN có thể hoạt động ổn định trong môi trường nhiều nhiễu điện từ, chẳng hạn gần các bộ phận điện công suất trong xe.
- Tốc độ truyền dữ liệu:
- CAN có thể truyền dữ liệu với tốc độ lên đến 1 Mbps, đủ nhanh để quản lý và phản hồi kịp thời các thay đổi trong quá trình sạc.
- Độ tin cậy:
- CAN hỗ trợ cơ chế phát hiện lỗi và kiểm tra dữ liệu, giảm thiểu nguy cơ mất thông tin hoặc truyền sai.
///////////////
Để kiểm tra chức năng của hệ thống CAN H và CAN L, cần sử dụng các phương pháp chuyên biệt để xác định trạng thái hoạt động, phát hiện lỗi và đảm bảo hệ thống hoạt động ổn định. Dưới đây là các bước và phương pháp cơ bản:
1. Kiểm tra vật lý
Trước khi kiểm tra tín hiệu, hãy thực hiện kiểm tra vật lý:
- Dây dẫn và kết nối:
- Kiểm tra xem dây CAN H và CAN L có bị đứt, chập hoặc hở không.
- Đảm bảo các đầu nối chắc chắn, không bị oxi hóa hay hư hỏng.
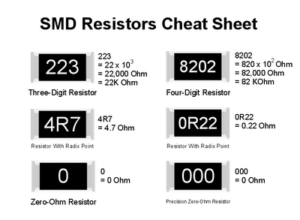
- Điện trở giữa CAN H và CAN L:
- Dùng đồng hồ đo điện trở kiểm tra giữa hai dây CAN H và CAN L.
- Kết quả thường là 60 ohm nếu có 2 điện trở 120 ohm song song ở hai đầu mạng CAN. Nếu không đúng, cần kiểm tra điện trở kết thúc (termination resistor).
2. Kiểm tra tín hiệu với máy hiện sóng (Oscilloscope)
Sử dụng máy hiện sóng để đo tín hiệu CAN H và CAN L:
- Kết nối máy hiện sóng:
- Kẹp một đầu vào CAN H, một đầu vào CAN L.
- Thiết lập thang đo điện áp từ 0V đến 5V.
- Phân tích tín hiệu:
- Quan sát tín hiệu khi hệ thống hoạt động:
- Khi truyền dữ liệu, tín hiệu CAN H sẽ dao động từ 2.5V đến 3.5V.
- Tín hiệu CAN L dao động từ 2.5V xuống 1.5V.
- Xác nhận dạng sóng đúng và không có nhiễu hoặc méo tín hiệu.
- Quan sát tín hiệu khi hệ thống hoạt động:
- Đánh giá lỗi:
- Nếu tín hiệu bị nhiễu mạnh hoặc không có tín hiệu, kiểm tra dây dẫn và các thiết bị trên mạng CAN.
3. Sử dụng thiết bị phân tích CAN (CAN Bus Analyzer)
Thiết bị này cho phép kiểm tra toàn diện mạng CAN, bao gồm:
- Kiểm tra giao tiếp:
- Kết nối thiết bị phân tích vào mạng CAN qua cổng OBD2 hoặc kết nối trực tiếp vào dây CAN H và CAN L.
- Gửi và nhận tín hiệu thử nghiệm để xác nhận khả năng giao tiếp.
- Đọc dữ liệu và xác thực:
- Kiểm tra ID của các nút (node) trên mạng.
- Xem xét dữ liệu truyền qua CAN bus, xác định thông điệp nào bị lỗi hoặc không phù hợp.
- Phát hiện lỗi:
- Các lỗi phổ biến như bit error, frame error, hoặc CRC error sẽ được thiết bị báo cáo.
4. Mô phỏng và thử nghiệm với phần mềm
- Dùng phần mềm CAN như PCAN, Vector CANalyzer hoặc BusMaster:
- Kết nối PC hoặc laptop với mạng CAN thông qua bộ chuyển đổi (CAN USB adapter).
- Gửi và nhận khung tin (frame) CAN để kiểm tra chức năng.
- Kiểm tra phản hồi:
- Quan sát các phản hồi từ các node trên mạng CAN.
- Đảm bảo các thông điệp đúng định dạng và thời gian phản hồi trong giới hạn.
5. Phương pháp kiểm tra chuyên sâu
- Thử nghiệm tải (Load Testing):
- Giả lập hoạt động của nhiều node trên mạng để kiểm tra khả năng chịu tải và đảm bảo mạng không bị quá tải.
- Kiểm tra nhiễu:
- Sử dụng tín hiệu nhiễu để đánh giá khả năng chống nhiễu của hệ thống.
Lưu ý quan trọng
- An toàn: Hệ thống CAN thường điều khiển các bộ phận quan trọng. Hãy đảm bảo xe được tắt nguồn hoặc ở chế độ an toàn khi kiểm tra.
- Sử dụng công cụ chuyên dụng: Để đạt kết quả chính xác, nên sử dụng các thiết bị và phần mềm được thiết kế riêng cho mạng CAN.