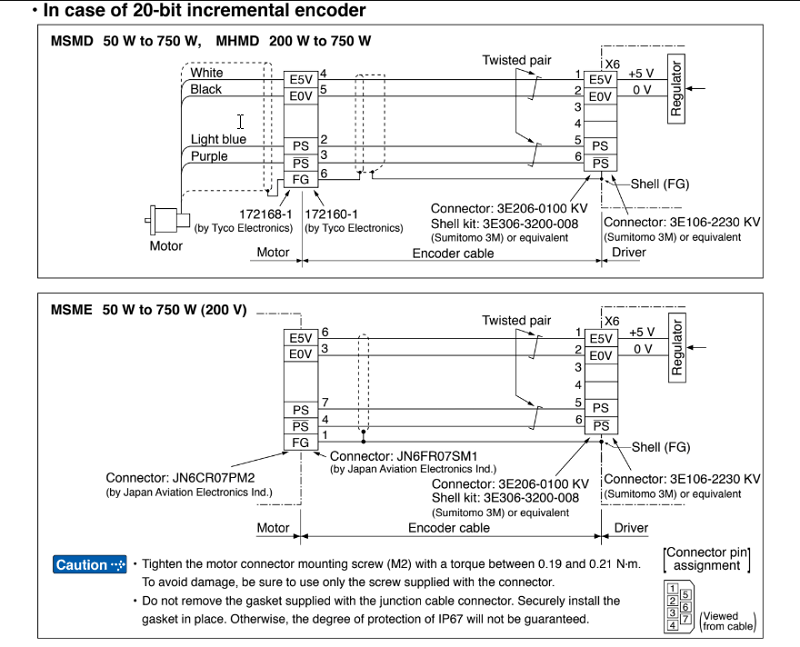
Để chế cáp encoder cho servo Panasonic Minas A5, anh cần hàn đúng sơ đồ chân (pinout) giữa đầu giắc cắm vào Driver (gọi là giắc CN2 – loại 6 chân 3M) và đầu giắc cắm vào Motor (loại giắc vuông nhựa JL05 hoặc giắc tròn quân sự tùy dòng motor).
Dưới đây là sơ đồ chi tiết và hướng dẫn chuẩn kỹ thuật để cáp chạy ổn định, không bị nhiễu.
1. Sơ đồ hàn chân (Pinout Diagram)
Dòng Servo A5 sử dụng giao thức truyền thông nối tiếp (Serial Communication) nên số lượng lõi dây khá ít, chủ yếu là nguồn và cặp tín hiệu vi sai.
Giắc CN2 (Phía Driver Panasonic A5 – Giắc 3M 6 chân)
Nhìn từ phía sau mặt hàn (hoặc xem số ký hiệu in nổi trên nhựa):
[ 2 ] [ 1 ] --> Hàng trên
[ 4 ] [ 3 ] --> Hàng giữa
[ 6 ] [ 5 ] --> Hàng dưới
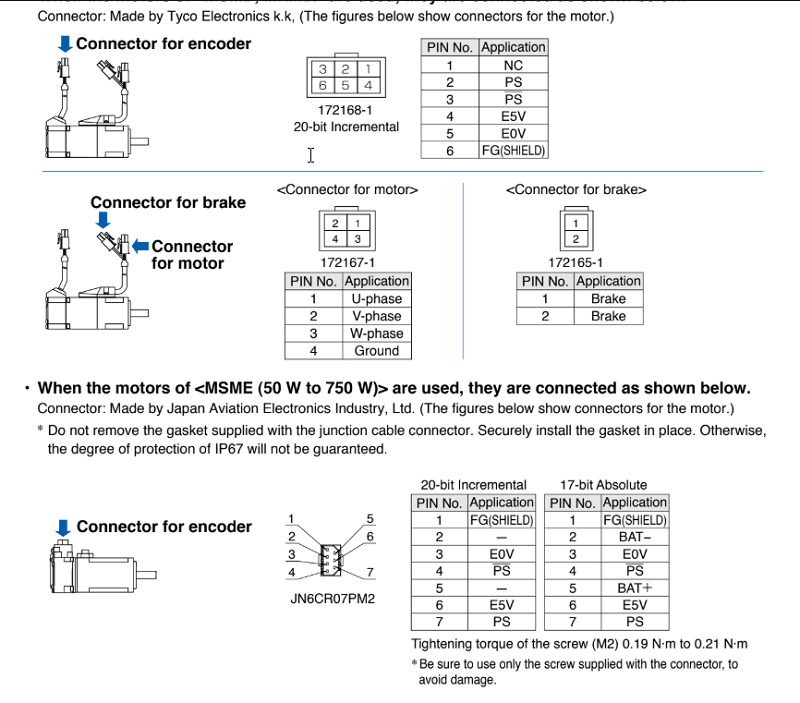
Bảng đối chiếu sơ đồ dây:
| Tín hiệu | Chức năng | Chân giắc CN2 (Driver) | Chân giắc Motor nhỏ(Nhựa vuông 9 chân) | Chân giắc Motor lớn(Tròn quân sự) |
| EOV | Nguồn 0V (GND) | Chân 1 | Chân 6 | Chân G |
| E5V | Nguồn 5V | Chân 2 | Chân 3 | Chân H |
| BAT+ | Nguồn Pin (nếu dùng Động cơ Tuyệt đối) | Chân 3 | Chân 5 | Chân D |
| BAT- | Nguồn Pin (GND) | Chân 4 | Chân 2 | Chân F |
| PS | Tín hiệu Serial data (+) | Chân 5 | Chân 4 | Chân A |
| /PS | Tín hiệu Serial data (-) | Chân 6 | Chân 1 | Chân B |
| FG | Tiếp địa / Giáp chống nhiễu | Vỏ kim loại giắc | Chân 9 hoặc Vỏ | Chân I hoặc Vỏ |
⚠️ Lưu ý quan trọng về Pin (Battery): > * Nếu anh dùng motor Incremental (Động cơ tương đối – Mã mã mô tơ không có lò xo/pin): Không cần hàn chân 3 và chân 4 (BAT+ / BAT-).
Nếu dùng motor Absolute (Động cơ tuyệt đối): Bắt buộc phải hàn chân 3, 4 về khay pin trên driver để tránh lỗi mất tọa độ gốc khi tắt nguồn.
2. Loại dây và vật tư khuyến cáo
Do tín hiệu encoder là tín hiệu xung số tốc độ cao, rất dễ bị nhiễu gây ra các lỗi như Err 21.0 (Lỗi giao tiếp Encoder) hoặc Err 21.1:
-
Dây cáp: Nên chọn loại dây xoắn đôi có bọc giáp chống nhiễu (Shielded Twisted Pair).
-
Cặp chân
E5VvàEOVnên đi chung 1 cặp xoắn (hoặc chọn lõi to hơn nếu cáp dài trên 10m để tránh sụt áp). -
Cặp chân
PSvà/PSbắt buộc phải là một cặp dây xoắn đôi với nhau để triệt tiêu nhiễu vi sai.
-
-
Giắc CN2: Dùng loại giắc tương thích 3M 6 pin (Mã: IO-3M06 hoặc tương đương).
3. Các bước hàn và xử lý chống nhiễu
-
Xử lý giáp chống nhiễu (Shield): Ở đầu giắc CN2 (Driver), anh tuốt lớp giáp lưới ra, xoắn lại và hàn trực tiếp vào phần vỏ kẹp kim loại của giắc CN2. Đầu phía motor cũng nối giáp vào vỏ giắc hoặc chân FG.
-
Hàn dây: Chấm chì nhanh vào chân giắc và đầu dây trước. Tránh ngâm mỏ hàn quá lâu làm chảy nhựa định vị chân của giắc 3M.
-
Cách điện: Dùng ống co nhiệt (ống gen co) bọc riêng từng chân sau khi hàn để tránh tình trạng các sợi đồng tưa ra chạm chập lẫn nhau.
Tham khảo các hình phía dưới ok