Để chạy test JOG cho Servo Delta ASDA-A2 trực tiếp từ phần mềm ASDA-Soft (phiên bản V5.4.1.0) trên máy tính, bạn cần đảm bảo cáp kết nối (CN4 – Mini USB) đã cắm chắc chắn và driver đã nhận diện.
Dưới đây là quy trình từng bước chi tiết và an toàn để thực hiện:
Bước 1: Chuẩn bị và Kiểm tra An toàn
⚠️ QUAN TRỌNG: Khi chạy JOG qua phần mềm, motor sẽ quay. Hãy đảm bảo cốt (trục) motor đã được tách rời khỏi tải/cơ cấu cơ khí hoặc cơ cấu có thể di chuyển tự do trong khoảng an toàn để tránh va đập hư hỏng.
-
Cấp nguồn động lực và nguồn điều khiển cho Servo Drive A2.
-
Kết nối cáp USB từ máy tính vào cổng CN4 của Drive.
-
Bật phần mềm ASDA-Soft V5.4.1.0.
Bước 2: Kết nối phần mềm với Servo (Online)
-
Trên thanh công cụ của ASDA-Soft, chọn mục Communication -> Communication Setting.
-
Chọn đúng cổng COM (kiểm tra trong Device Manager của máy tính để biết cổng COM của cáp USB).
-
Nhấn Connect (hoặc biểu tượng hình hai phích cắm nối vào nhau) để chuyển sang chế độ Online. Nếu góc dưới bên trái màn hình hiển thị màu xanh và báo “Online” kèm mã Drive là bạn đã kết nối thành công.
Bước 3: Mở giao diện JOG và thao tác
-
Trên thanh menu hoặc cây thư mục bên trái (Tree View), tìm và chọn mục Digital IO / Jog Control (hoặc vào Tools -> Jog Control). Một cửa sổ nhỏ chuyên dụng cho lệnh JOG sẽ xuất hiện.
-
Cài đặt tốc độ JOG: * Tìm ô Jog Speed (r/min) hoặc Speed (rpm).
-
Nhập tốc độ mong muốn. Lời khuyên: Nên thử nghiệm với tốc độ thấp trước (ví dụ: 100 rpm đến 300 rpm) để đảm bảo an toàn.
-
-
Kích hoạt Servo (Servo ON):
-
Trong cửa sổ JOG, nhấn vào nút Servo ON (nút này thường sẽ đổi sang màu xanh lá cây hoặc hiển thị trạng thái ON).
-
Lúc này, trục motor sẽ khóa cứng (đóng điện). Nếu có lỗi (Alarm) xuất hiện, bạn cần nhấn Clear Alarm trước.
-
-
Tiến hành chạy thử (JOG):
-
Chạy thuận (CW): Nhấn và giữ chuột vào nút Forward (hoặc mũi tên hướng lên/phải). Motor sẽ quay theo chiều thuận và dừng lại ngay khi bạn nhả chuột.
-
Chạy nghịch (CCW): Nhấn và giữ chuột vào nút Reverse (hoặc mũi tên hướng xuống/trái). Motor sẽ quay theo chiều ngược lại và dừng khi nhả chuột.
-
-
Kết thúc:
-
Sau khi test xong, nhấn nút Servo OFF để ngắt điện motor.
-
Đóng cửa sổ JOG để trả lại quyền điều khiển cho các chân vật lý (External I/O).
-
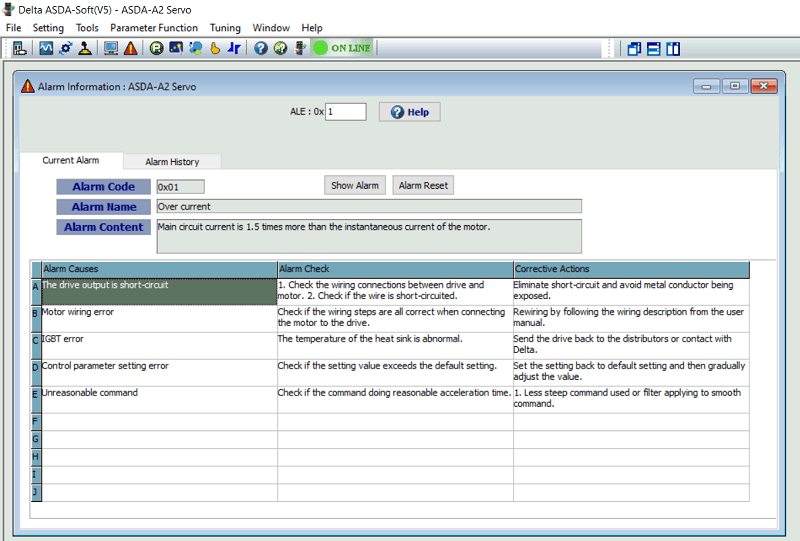
Các lỗi thường gặp khi không chạy được JOG
-
Lỗi “Command Denied” hoặc không nhấn được Servo ON: Do các chân kích hoạt vật lý ngoài phần cứng (như chân DI7/DI8 được cài làm Disable/Limit) đang chặn. Bạn cần đảm bảo không bị dính các lỗi giới hạn hành trình (Overtravel – NL/PL) hoặc lỗi khẩn cấp (EMG).
-
Motor giật mạnh rồi báo lỗi (ALE01/ALE06/ALE09): Kiểm tra lại xem thông số motor có khớp với Drive không, hoặc cáp động lực/cáp encoder có bị cắm lỏng hay sai thứ tự pha không.